5.2. Analyse numérique¶
5.2.1. Résolution d’équations par dichotomie¶
Il s’agit ici de calculer une valeur approchée d’une solution d’une équation du type \(f(x)=0\). On ne cherche pas à obtenir une expression exacte d’une telle solution, ce qui est de toute façon évidemment impossible de manière générale.
On suppose qu’on dispose d’une fonction \(f\) continue et strictement monotone sur un intervale \([a,b]\) vérifiant \(f(a)f(b)\leq0\). Le théorème des valeurs intermédiaires garantit l’existence d’une unique solution à l’équation \(f(x)=0\) sur l’intervalle \([a,b]\). Pour obtenir une valeur approchée de cette solution, on procède par dichotomie :
- On calcule \(c=(a+b)/2\) et \(f(c)\).
- Si \(f(a)f(c)\leq0\), la solution appartient à l’intervalle \([a,c]\). Sinon, elle appartient à l’intervalle \([c,b]\).
- Dans le premier cas, on remplace \(b\) par \(c\) tandis que dans le second cas, on remplace \(a\) par \(c\).
- On répète les étapes 1., 2. et 3. tant que la longeur de l’intervalle \([a,b]\) est supérieur à une précision \(\epsilon\) donnée.
- La valeur de \(c\) est alors une valeur appochée de la solution de \(f(x)=0\) à \(\epsilon/2\) près.
In [1]: def dicho(f, a, b, eps):
...: while abs(b-a) > eps:
...: c = (a + b) / 2
...: if f(a) * f(c) <= 0:
...: b = c
...: else:
...: a = c
...: return (a+b) / 2
...:
In [2]: from math import sin
In [3]: dicho(sin, 2, 4, .0001)
Out[3]: 3.141571044921875
Il est à remarquer que le module scipy dispose déjà de fonctions pouvant résoudre de manière approchée des équations du type \(f(x)=0\).
In [4]: from scipy.optimize import fsolve
In [5]: from math import cos
In [6]: f = lambda x: cos(x**2)
In [7]: x0 = fsolve(f, 0)
In [8]: x0
Out[8]: array([-49.99136881])
In [9]: f(*x0)
������������������������������Out[9]: -1.063024370691732e-13
5.2.2. Calcul d’intégrales¶
On expose ici des algorithmes de calcul approché d’intégrales [1]. A nouveau, on ne cherche pas à obtenir des expressions exactes de ces intégrales.
5.2.2.1. Méthode des rectangles¶
On peut approcher une intégrale par une somme d’aire de rectangles comme l’indique la figure suivante.
Plus précisément, en posant \(x_k=a+k(b-a)/n\) où \(n\) désigne le nombre de rectangles :
On peut alors proposer la fonction suivante pour approcher l’intégrale d’une fonction \(f\) sur un intervalle \([a,b]\).
In [10]: def rectangles(f, a, b, N, side):
....: pas = (b-a) / N
....: x = a
....: somme = 0
....: for _ in range(N):
....: if side:
....: somme += f(x)
....: x += pas
....: if not side:
....: somme += f(x)
....: return somme / N
....:
In [11]: rectangles(lambda x: x**2, 0, 1, 100, True)
Out[11]: 0.3283500000000004
In [12]: rectangles(lambda x: x**2, 0, 1, 100, False)
����������������������������Out[12]: 0.33835000000000043
Les sommes \(R_n\) et \(S_n\) sont appelées des sommes de Riemann et on peut même prouver que pour une fonction \(f\) continue,
En particulier, l’appoximation de l’intégrale \(\int_a^bf(t)\,\mathrm{dt}\) est d’autant meilleure que le nombre \(n\) de rectangles est grand, ce qui se conçoit très bien géométriquement [2].
5.2.2.2. Méthode des trapèzes¶
On peut également apporcher une intégrale comme une somme d’aires de trapèzes comme sur la figure suivante. Bien évidemment, l’approximation de l’intégrale est meilleure qu’avec des rectangles.
A nouveau, en posant \(x_k=a+k(b-a)/n\) où \(n\) désigne le nombre de trapèzes :
On peut évidemment remarquer que \(T_n=(R_n+S_n)/2\). En fait, la somme précédente peut se réécrire de manière différente :
Cette nouvelle formule permet de calculer \(T_n\) en effectuant moins d’opérations qu’avec la formule précédente. On peut alors donner l’algorithme suivant.
In [13]: def trapezes(f, a, b, N):
....: pas = (b-a) / N
....: x = a
....: somme = (f(a) + f(b)) / 2
....: for _ in range(N-1):
....: x += pas
....: somme += f(x)
....: return somme / N
....:
In [14]: trapezes(lambda x: x**2, 0, 1, 100)
Out[14]: 0.3333500000000004
5.2.3. Résolution d’équations différentielles¶
L’objectif est de résoudre numériquement des équations différentielles : c’est-à-dire qu’on ne cherche pas des expressions explicites des solutions mais des valeurs approchées [3].
Pour commencer, on traitera le cas de problème de Cauchy d’ordre 1.
On rappelle qu’un tel problème consiste en la donnée d’une équation différentielle résolue d’ordre 1 \(y'=f(t,y)\) et d’une condition initiale \(y(t_0)=y_0\). Le théorème de Cauchy-Lipschitz garantit l’existence et l’unicité d’une solution à ce problème lorsque \(f\) est suffisamment règulière.
L’idée est d’utiliser une approximation affine de la fonction solution : \(y(t+\Delta\!t)\approx y(t)+y'(t)\Delta\!t\). Le calcul de \(y'(t)\) est possible grâce à l’équation différentielle si l’on connaît \(y(t)\) puisque \(y'(t)=f(t,y(t))\). On itère ce processus pour calculer des valeurs approchées à des intervalles de temps réguliers. Plus précisément, en posant \(t_k=t_0+k\Delta\!t\), on a alors
La méthode que l’on vient de décrire porte le nom de méthode d’Euler.
In [15]: def euler(f, t0, y0, pas, nb):
....: t = t0
....: y = y0
....: liste_t = [t]
....: liste_y = [y]
....: for _ in range(nb):
....: y += f(t, y) * pas
....: t += pas
....: liste_t.append(t)
....: liste_y.append(y)
....: return liste_t, liste_y
....:
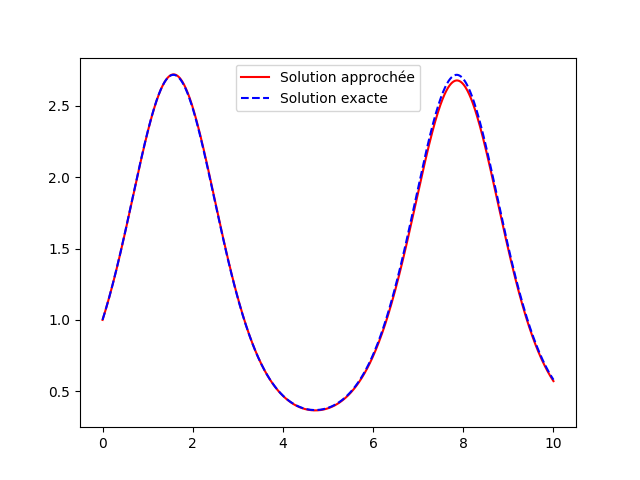
Par exemple, on calcule ici une solution approchée du système de Cauchy
In [16]: from math import cos
In [17]: f = lambda t, y: cos(t) * y
In [18]: liste_t, liste_y = euler(f, 0, 1, .01, 1000)
On peut tracer la courbe de la solution apporchée que l’on peut comparer à la courbe de la solution exacte. En effet, on montre sans peine que l’unique solution de ce problème de Cauchy est la fonction \(x\mapsto e^{\sin(x)}\).
In [19]: import matplotlib.pyplot as plt
In [20]: from numpy import exp, sin, linspace
In [21]: plt.figure();
# Tracé de la solution approchée
In [22]: plt.plot(liste_t, liste_y, color='red', label='Solution approchée');
# Tracé de la solution exacte
In [23]: x = linspace(0, 10, 1000)
In [24]: y = exp(sin(x))
In [25]: plt.plot(x, y, '--', color='blue', label='Solution exacte');
In [26]: plt.legend();
In [27]: plt.show()
Bien entendu, l’approximation affine \(y'(t+\Delta\!t)\approx f(t)+f'(t)\Delta\!t\) est d’autant meilleur que \(\Delta\!t\) est petit.
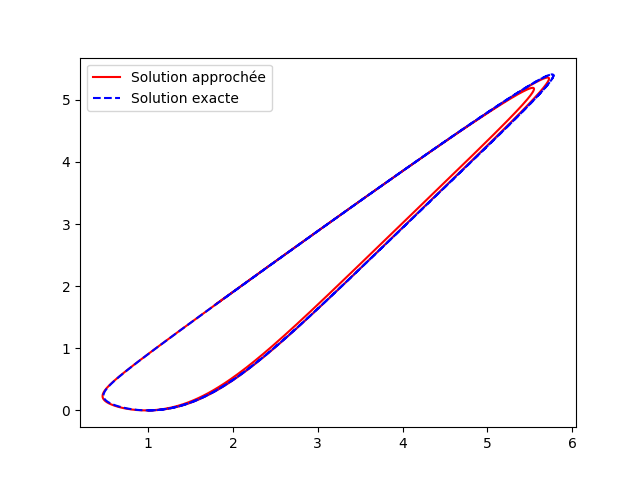
On peut adapter la méthode au cas d’un système différentiel d’ordre 1. Soit par exemple à résoudre le système différentiel suivant.
In [28]: def euler(f, t0, X0, pas, nb):
....: t = t0
....: X = X0
....: liste_t = [t]
....: liste_X = [X]
....: for _ in range(nb):
....: X = [x + u * pas for x, u in zip(X, f(t, X))]
....: t += pas
....: liste_t.append(t)
....: liste_X.append(X)
....: return liste_t, liste_X
....:
In [29]: from math import cos, sin
In [30]: f = lambda t, X: [cos(t) * X[0] + sin(t) * X[1], sin(t) * X[0] + cos(t) * X[1]]
In [31]: liste_t, liste_X = euler(f, 0, [1, 0], .01, 1000)
In [32]: import matplotlib.pyplot as plt
In [33]: from numpy import exp, sin, cos, sinh, cosh
In [34]: plt.figure();
# Tracé de la solution approchée
In [35]: plt.plot(*zip(*liste_X), color='red', label='Solution approchée');
# Tracé de la solution exacte
In [36]: t = linspace(0, 10, 1000)
In [37]: x = exp(sin(t)) * cosh(1 - cos(t))
In [38]: y = exp(sin(t)) * sinh(1 - cos(t))
In [39]: plt.plot(x, y, '--', color='blue', label='Solution exacte');
In [40]: plt.legend();
In [41]: plt.show()
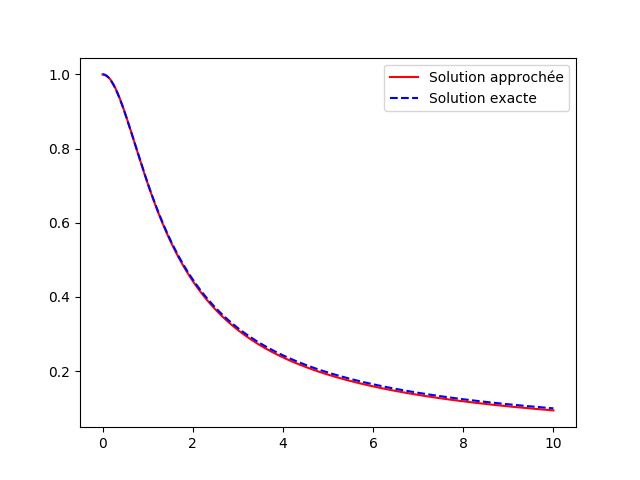
On sait qu’il est toujours possible de ramener une équation différentielle scalaire d’ordre strictement supérieur à 1 à un système différentiel d’ordre 1.
Par exemple, si l’on désire résoudre le problème de Cauchy
on peut se ramener au système différentiel d’ordre 1 suivant
In [42]: f = lambda t, X: [X[1], -X[0] / (1 + t**2)**2 - 2 * t / (1 + t**2) *X[1]]
In [43]: liste_t, liste_X = euler(f, 0, [1, 0], .01, 1000)
In [44]: import matplotlib.pyplot as plt
In [45]: from numpy import sqrt
In [46]: plt.figure();
# Tracé de la solution approchée
In [47]: plt.plot(liste_t, [X[0] for X in liste_X], color='red', label='Solution approchée');
# Tracé de la solution exacte
In [48]: t = linspace(0, 10, 1000)
In [49]: y = 1/sqrt(1 + t**2)
In [50]: plt.plot(t, y, '--', color='blue', label='Solution exacte');
In [51]: plt.legend();
In [52]: plt.show()
| [1] | Le module In [53]: from scipy.integrate import quad
In [54]: quad(lambda x: 1 / x**2, 1, 2)
Out[54]: (0.49999999999999994, 5.551115123125782e-15)
La fonction |
| [2] | Il ne faut cependant pas crier victoire trop tôt. Tout d’abord, le temps de calcul augmente avec \(n\). De plus, chaque opération dans l’algorithme entraîne une erreur d’arrondi minime mais, le nombre d’opérations augmentant avec \(n\), le cumul de ces erreurs d’arrondi finit par dépasser le gain en précision lorsque \(n\) est très grand. |
| [3] | Le module scipy.integrate dispose déjà d’une fonction odeint à cet effet. |